As briefly mentioned in my last post, my next project is an autonomous quadcopter. That is, a four-rotored flying robot.
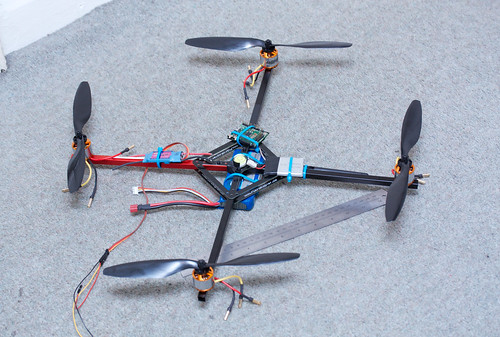
After a couple of weeks of waiting around, I've got all the parts I've ordered so far: a basic aluminium chasis from MikroKopter, four 1040Kv/14A brushless motors, four propellers, some 3000mAh 3S lipo batteries, and a whole suite of sensors on breakouts from SparkFun, including an accelerometer, gyroscopes, barometer, magnetometer and GPS. I've also got spares of a few parts and a second set of accelerometers and gyroscopes to compare with.
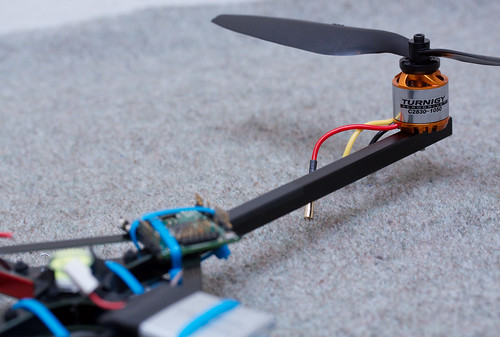
I also bought four normal brushless motor controllers, which take a PWM input and control the motor. They're fine for prototyping with, but I plan to make my own motor controllers that will take throttle values at a much higher rate over I²C, as well as being capable of reporting information (voltage, current, rpm) back to the main controller. However, I've not bought the parts for the motor controllers yet, so for now I'm using the pre-made ones.
To start with, I'm writing code to read all the sensors and check their results. This also means I can plug the sensor values into a simulation on my computer to test filters and control code, rather than having to run it on the quad every time I need to change a parameter. All the code is on GitHub: http://github.com/randomskk/Robot4 and so far I've written code for the accelerometer (SCA3000) and the barometer (SCP1000). The accelerometer values are read into memory the whole time over DMA, while the barometer is polled when required as its update rate is about 2Hz so there's no point wasting a DMA channel. The next thing to do will be the gyroscopes.
I'll post updates here as the robot progresses...