
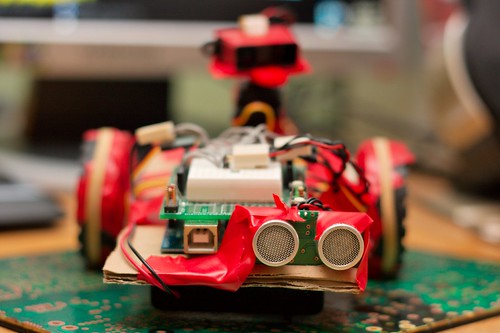
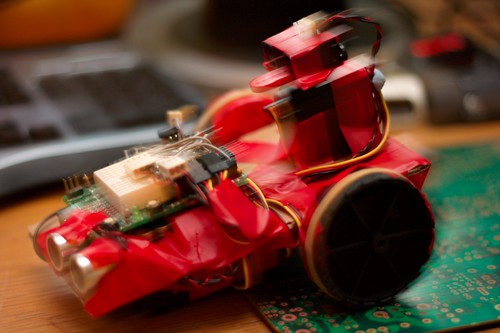
This is my first prototype robot. A friend and I got together and he taped stuff to cardboard while I connected wires up and then we wrote a basic program and the prototype drove!
This version literally just drives forward until the ultrasonic sensor detects an obstacle, then it turns and drives forwards again. We can also rotate the servo the IR sensor is on and read the IR sensor, though we haven't yet determined what voltages represent what voltages (it's non-linear, typically).
The drive motors are the two servos I modified for continuous rotation, with an Arduino+Protoshield to control it.
This prototype has since been disassembled and work started on the new version, with a vacuum formed plastic chassis and normal geared motors harvested from an old toy. That one probably won't get finished for a few months though, so I thought I'd post the cardboard prototype now.